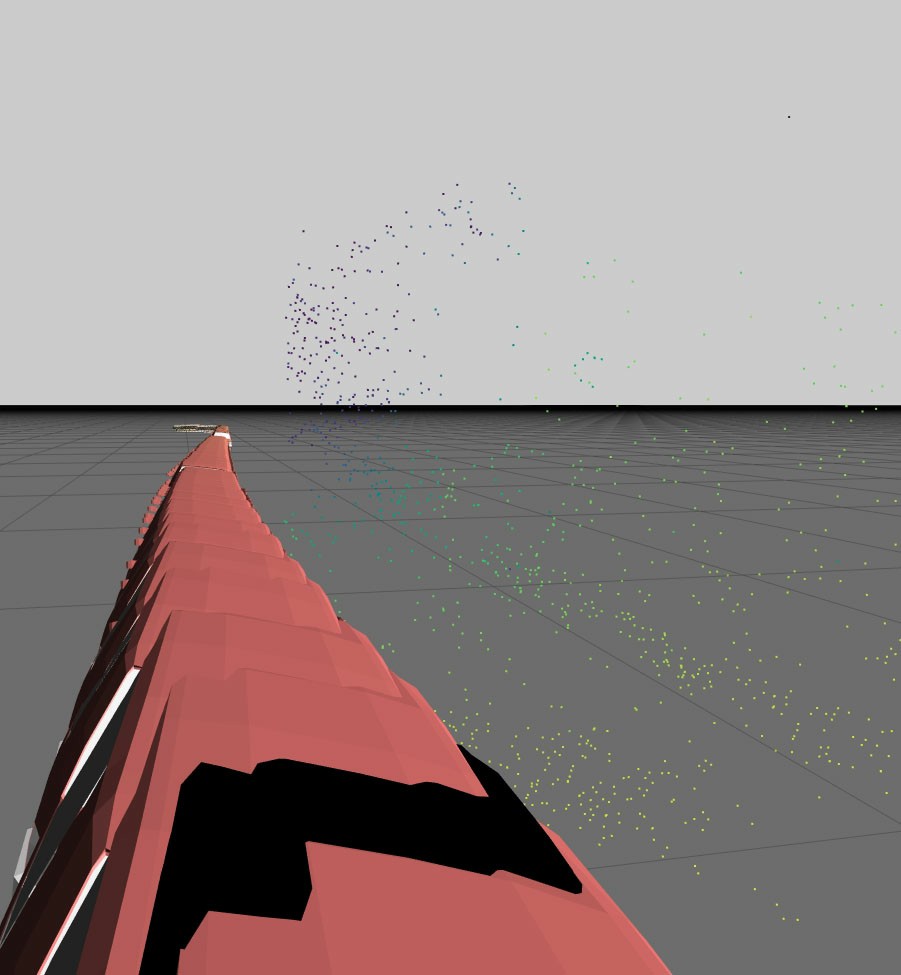
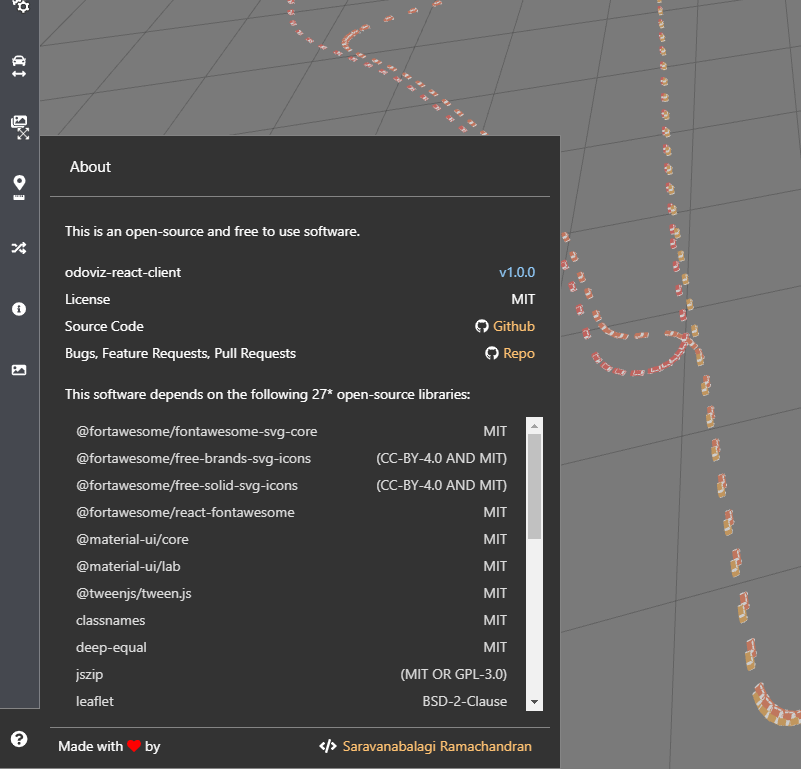
- Screenshot
A modular and highly tweakable web-based odometry visualization and processing tool designed to load, inspect, visualize and process poses, point clouds and camera images from many common autonomous vehicle and mobile robotics datasets.
This Swiss army knife for visualizing driving datasets comes loaded with plenty of scene and offset settings, so you can get the bird-eye view no matter how the data was captured.

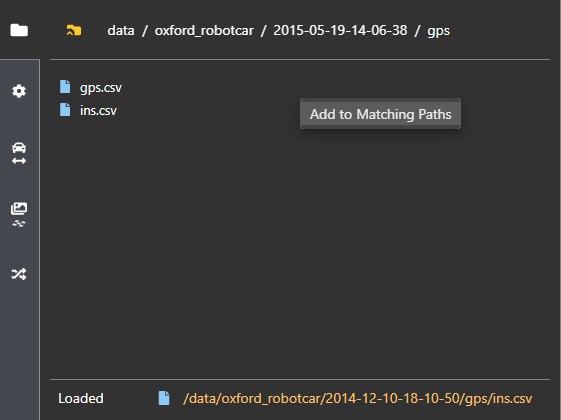
Supports loading trajectories from the large driving datasets Oxford Robotcar, KITTI Odometry, New College, St Lucia, BDD100K and CMU Seasons out of the box. Want to use your own dataset? Simply add a parser for the GPS/INS file and get moving.

Ships with Sampling, Matching and Distance Analysis modules. You can add your own! All modules are reactive and can subscribe to and modify the global store.

The platform has been open-sourced under MIT Licence to promote its use and encourage further contributions from the research community.
Limited access has been provided to use the tool online for demo purposes. The platform has been open-sourced to promote its use and encourage further contributions from the research community.
OdoViz includes, but not limited to, the following features to aid your research with driving datasets.
Adjust various settings related to the scene including size of the car, positional and rotational offsets, point size of point clouds, etc.
Customize the web user interface to your liking and make your own extensions and plugins to extend the capabilities of the tool.
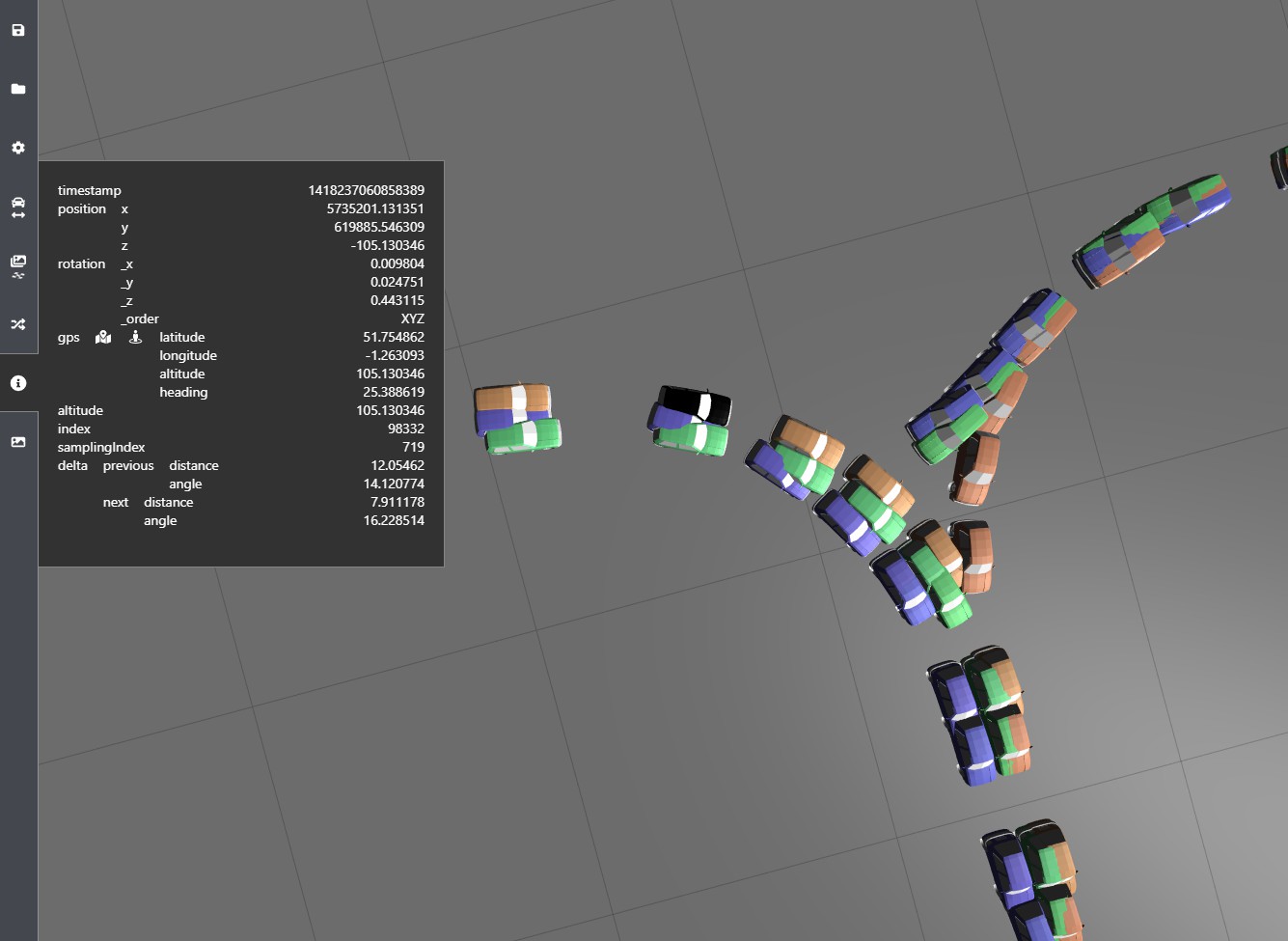
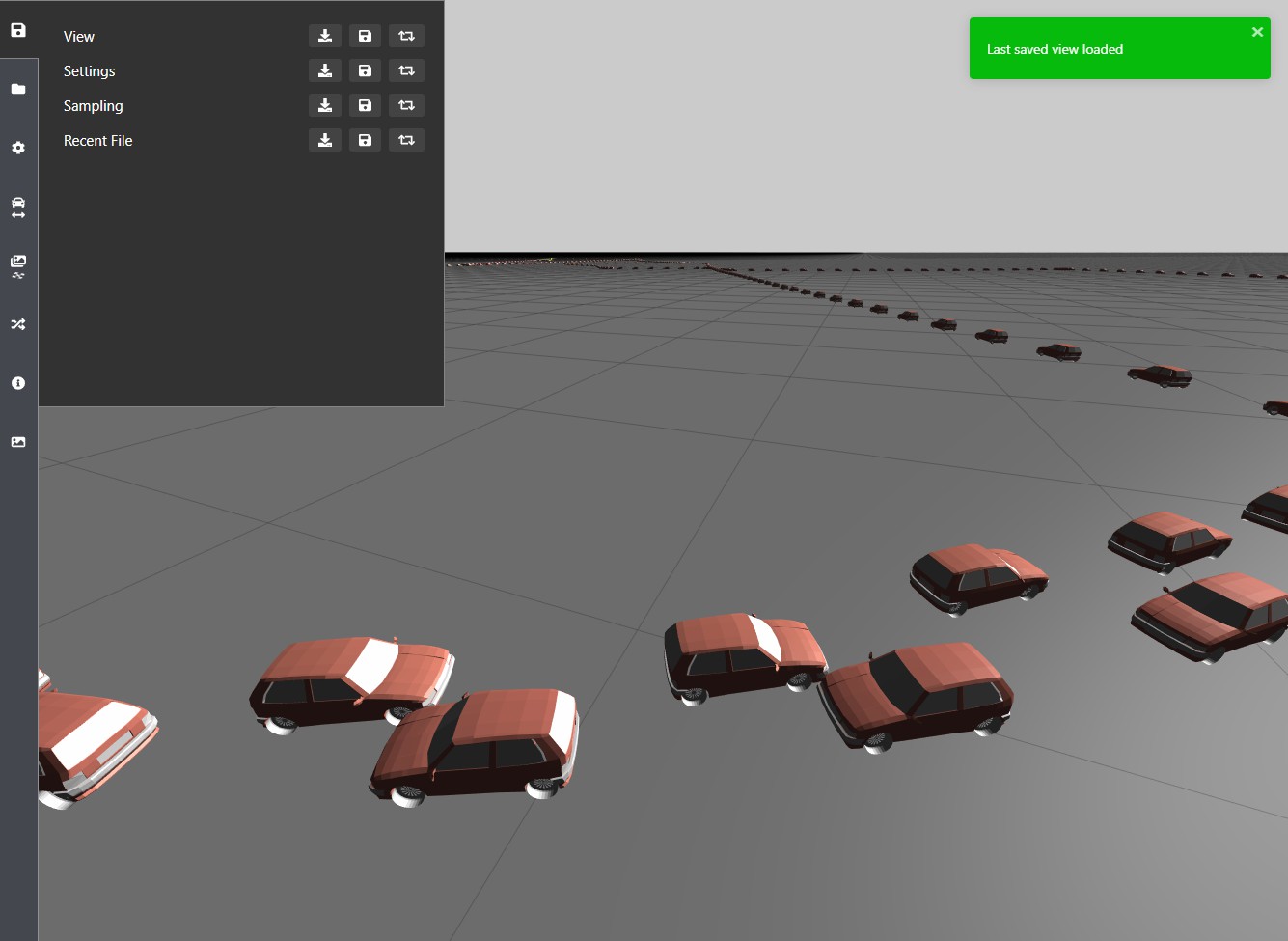
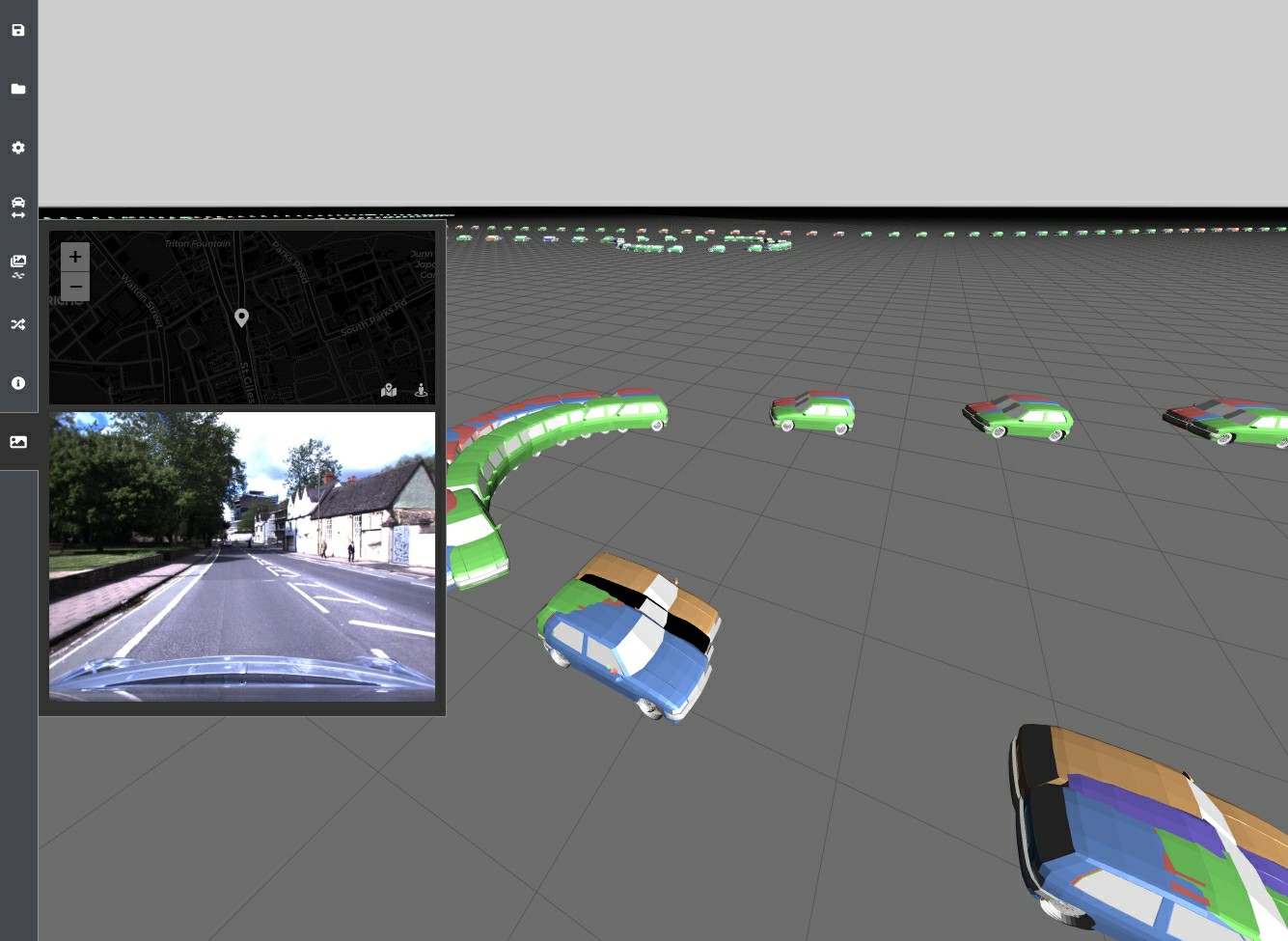
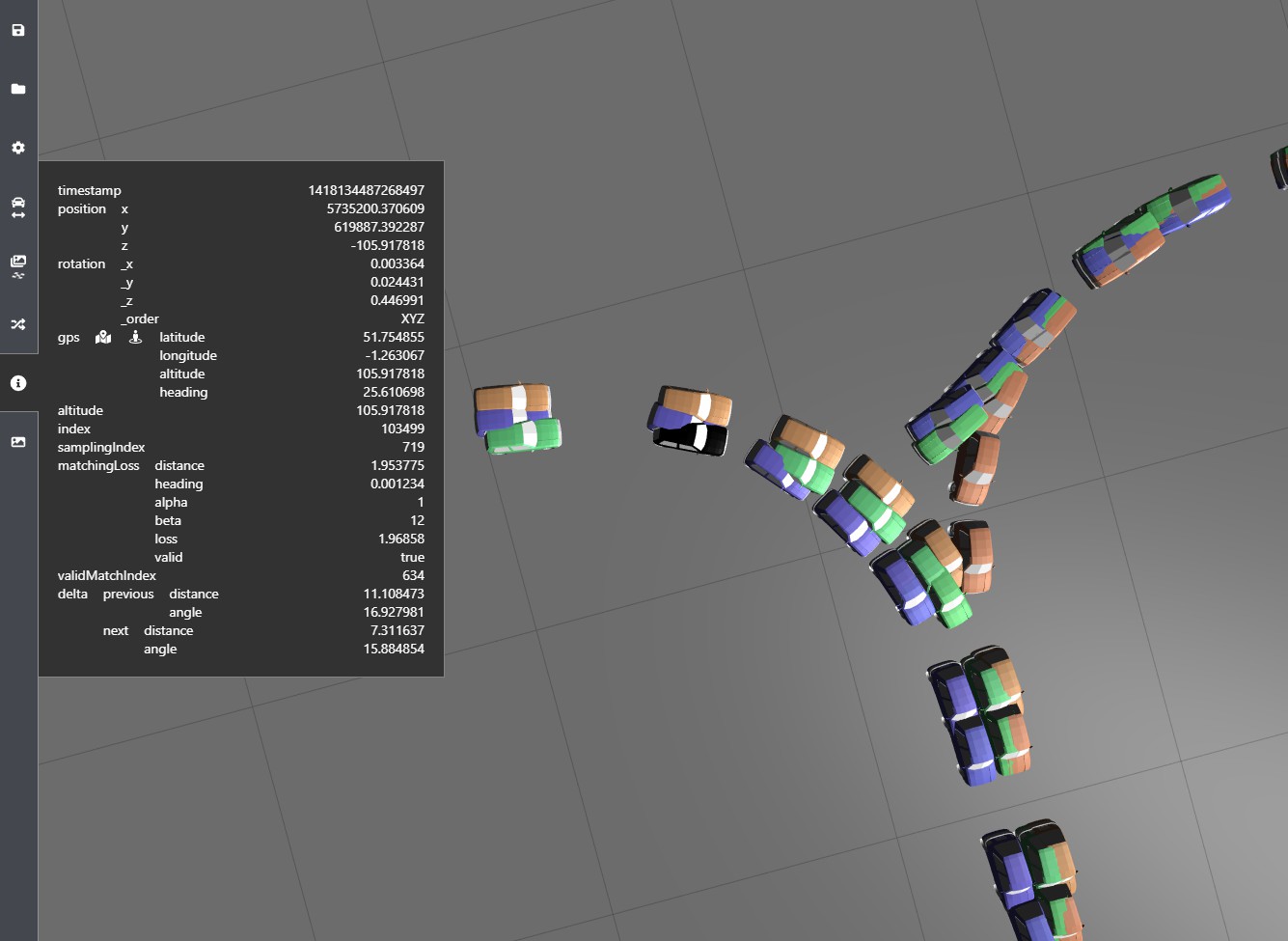
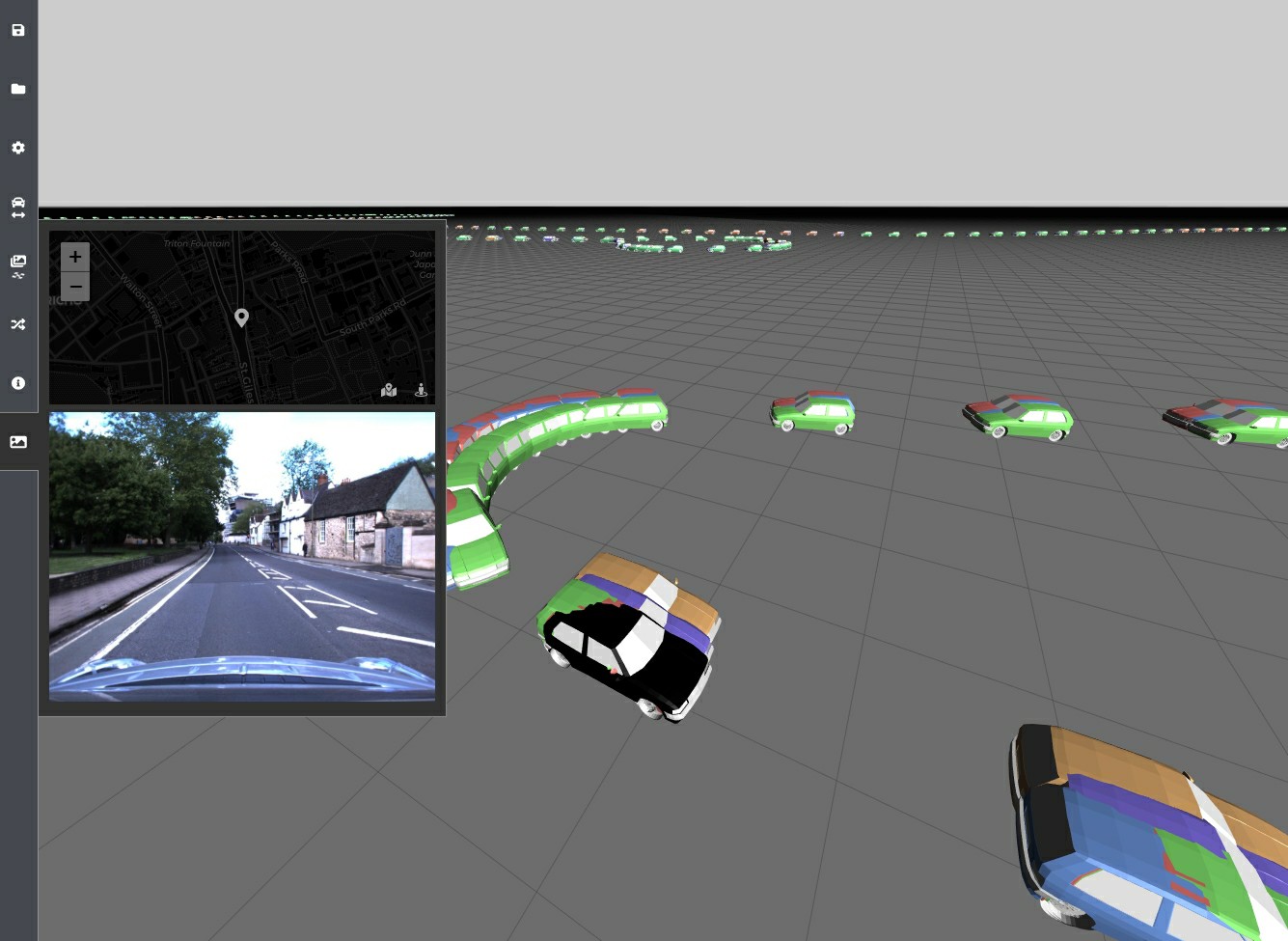
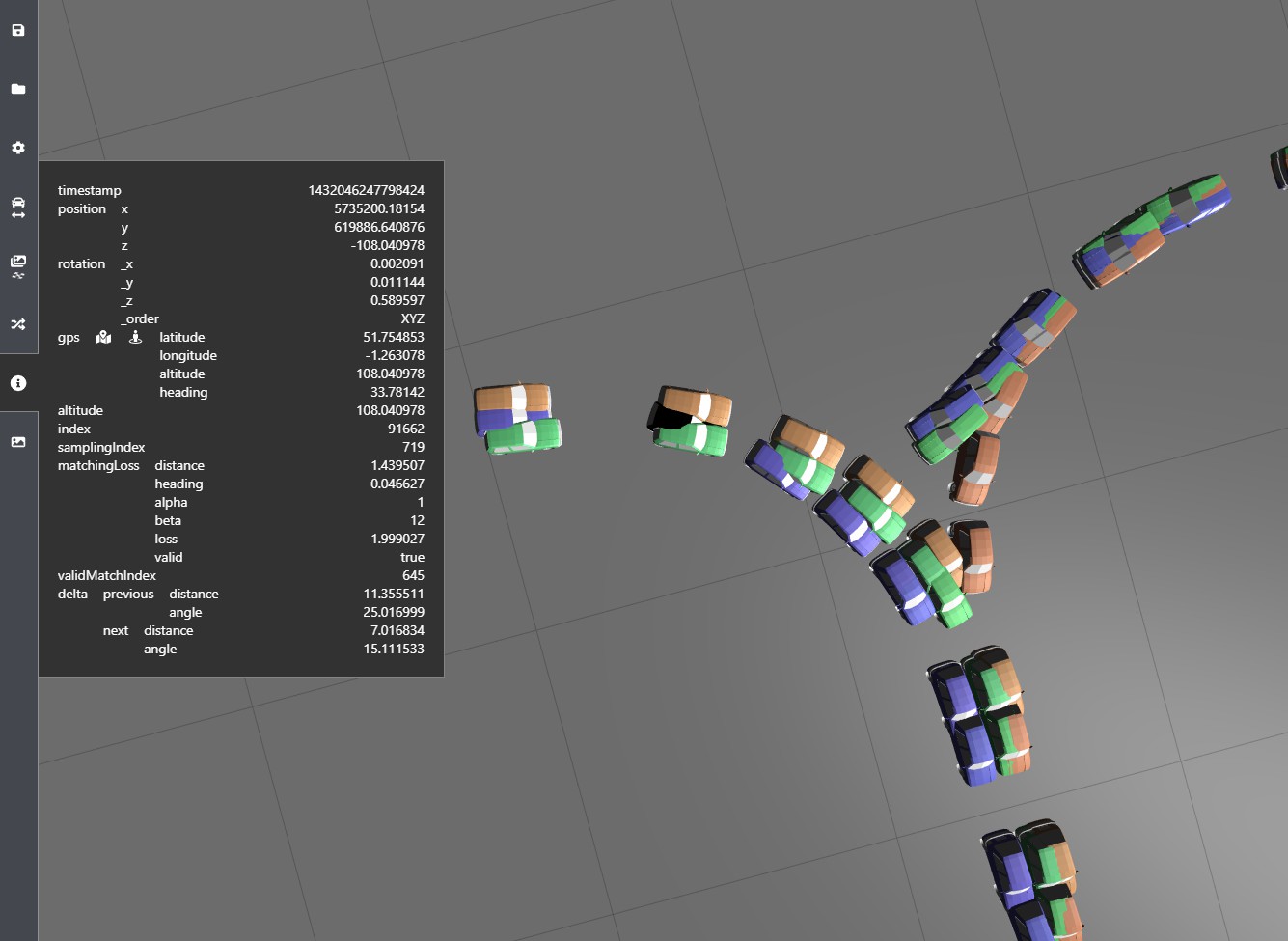
Visually inspect, compare, and analyze poses within and across multiple trajectories traversed at different time periods. Save and load settings and even viewpoints to analyze reproducibly.
Need to train your model with what you see? Export as JSON and load data into your pipeline.
Got a dense trajectory with tens of thousands of data-points? Use adaptive sampling and visualize with ease.
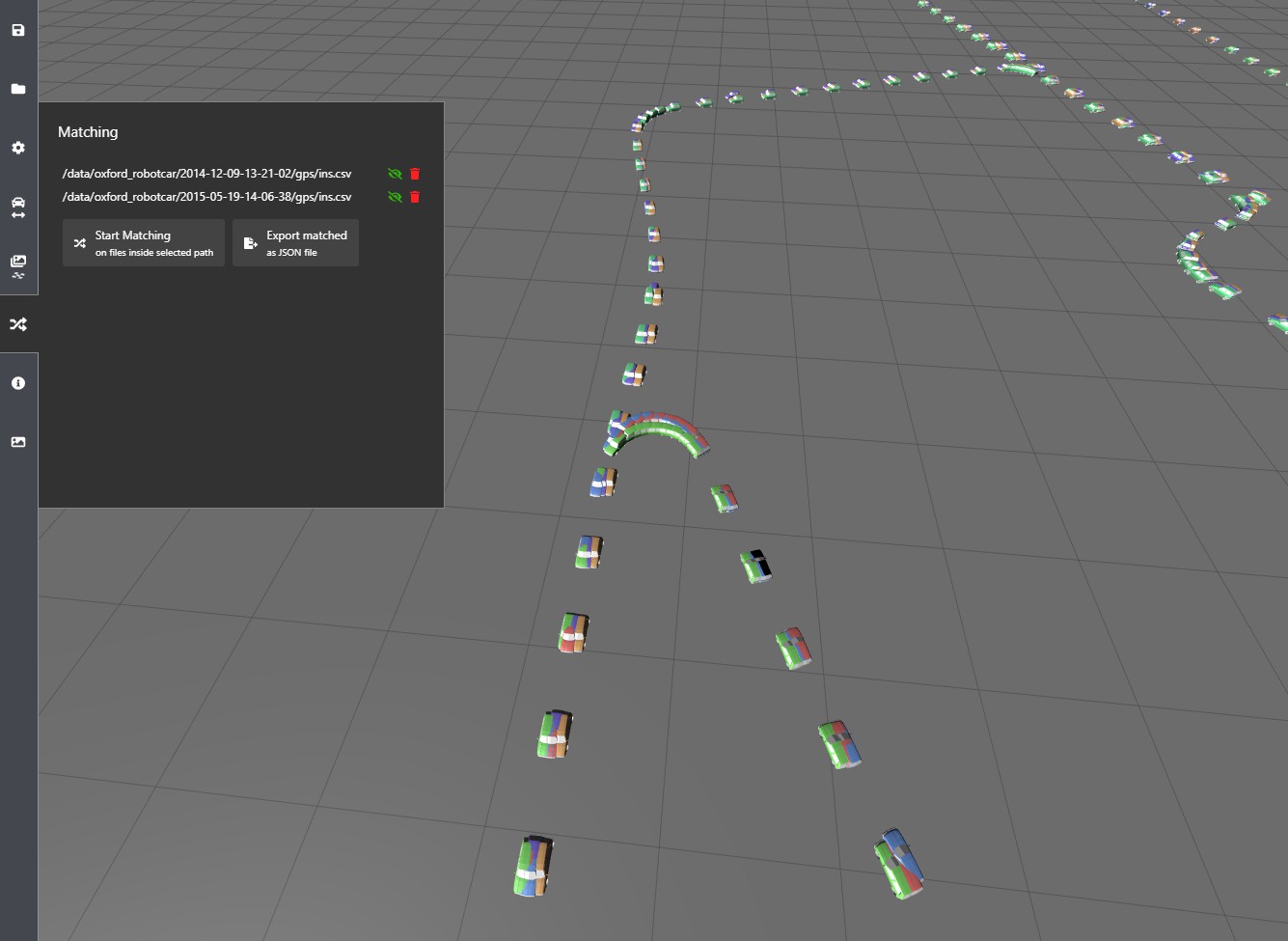
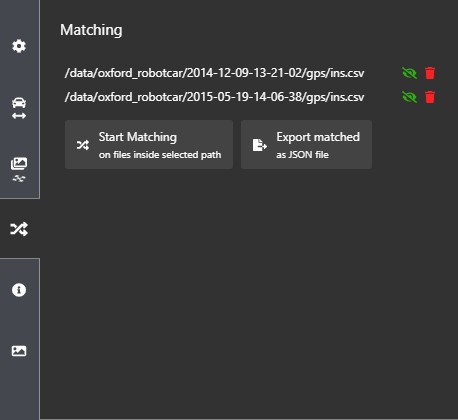
Match multiple traversals of the same trajectory to find pose correspondences, update matching rules to add constraints.
OdoViz has been published in 2021 IEEE International Intelligent Transportation Systems Conference (ITSC 2021) and is available on IEEE Xplore®. If you use this software and/or its code, please cite using
@INPROCEEDINGS{9564712,
author={Ramachandran, Saravanabalagi and McDonald, John},
booktitle={2021 IEEE International Intelligent Transportation Systems Conference (ITSC)},
title={OdoViz: A 3D Odometry Visualization and Processing Tool},
year={2021},
pages={1391-1398},
doi={10.1109/ITSC48978.2021.9564712}}
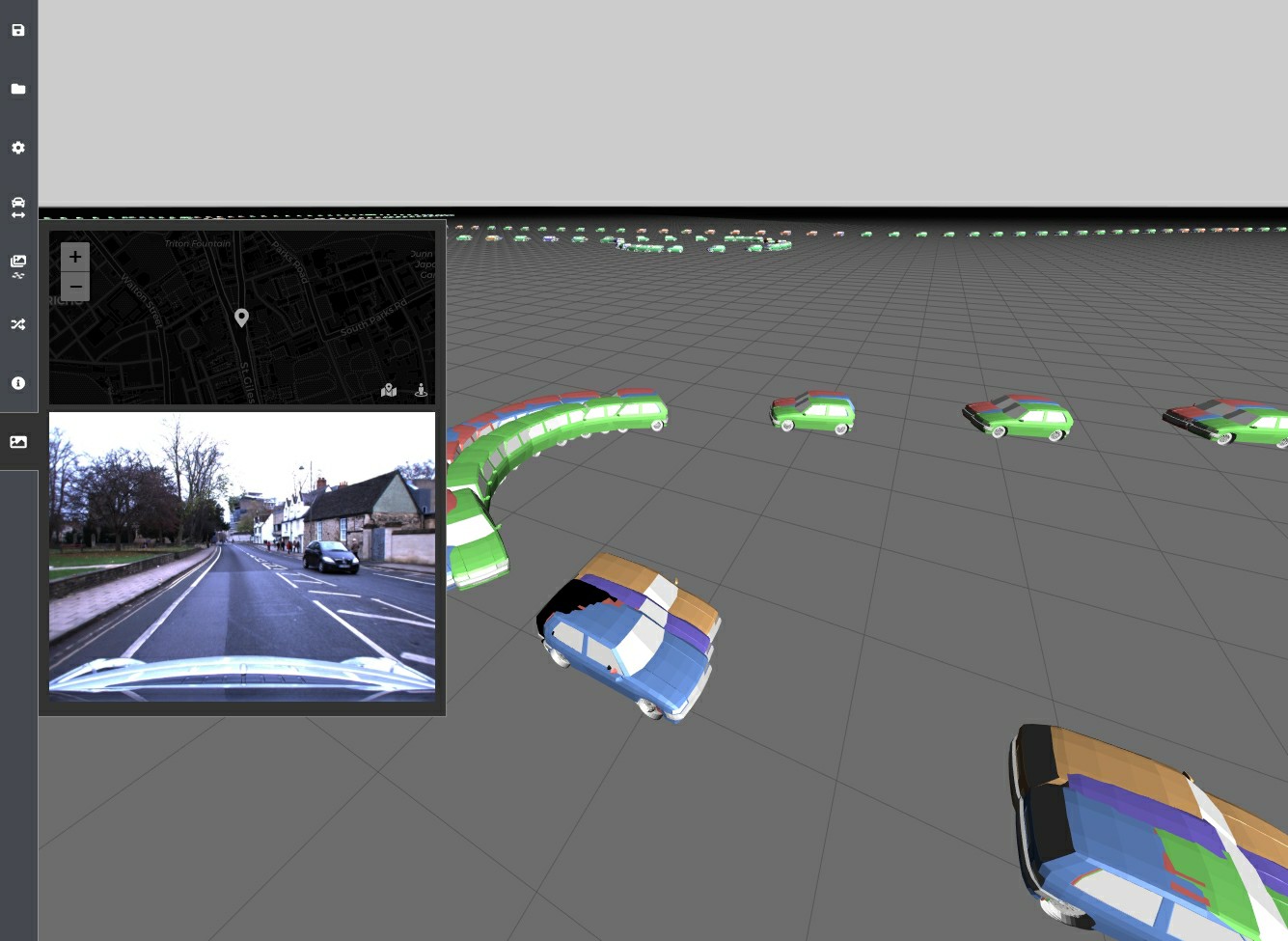
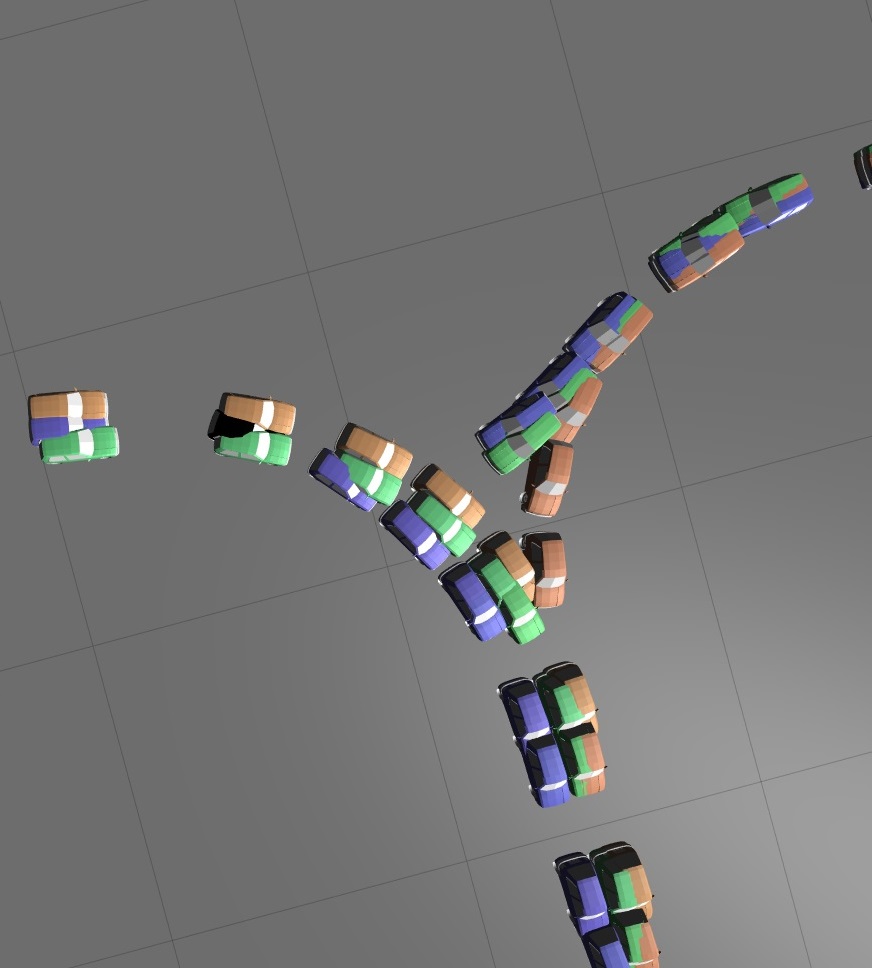
Screenshots showing some of the features in the visualization tool